Es gibt einige Anleitungen zu Gyroflow bei YouTube, doch keine davon geht so weit ins Detail oder erklärt die wichtigen Einstellungen, die Hebel die gestellt werden müssen. Diese beiden Videos auf YouTube haben mir den Einstieg und das Verständnis der einzelnen Einstellungen geholfen:
Gerade das zweite Video mit der Runcam Thumb war sehr hilfreich, nicht nur in Bezug auf die Einstellungen der Kamera selbst, sondern auch was die Arbeit mit Gyroflow angeht. Das erste Video war vielmehr ein "Hilferuf", um nicht ständig Windows starten zu müssen, nur weil ich wieder ein Insta360 go (v1) Video schneiden möchte. In der Beschreibung des Videos sind die Einstellungen für Gyroflow zu finden, was ebenfalls sehr geholfen hat.
Eine Kombination aus den beiden Anleitungen versuche ich hier verständlich in eine universell nutzbare Form zu bringen, so dass jeder brauchbare Ergebnisse erzielen kann. Ich nutze hier ein Video von einer mobius ActionCam (Lens A) und das Betaflight Blackbox Log (BBL) meines QAV180, ein sogn. "Lens Profile" für die mobius ActionCam findet man in Gyroflow, ich habe mein eigenes erstellt (evtl. ist es im nächsten Gyroflow release). Grundsätzlich funktioniert Gyroflow mit jeder ActionCam mit und ohne eigene Gyrodaten und einem BBL.
Nachdem man die entsprechende Version, passend zum Betriebssystem, geladen und bei Bedarf installiert hat, startet das Programm wie folgt:
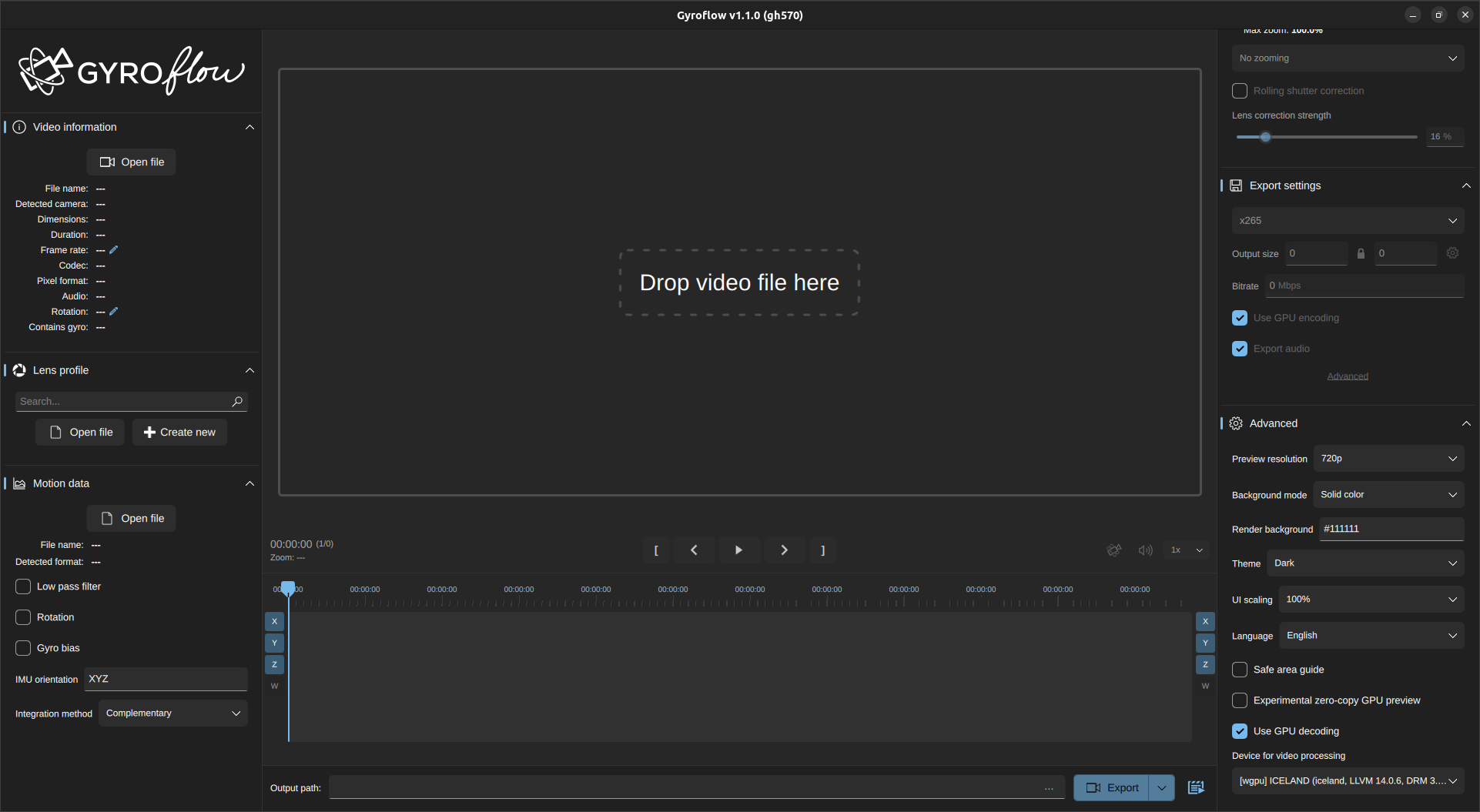
Betrachten wir zunächst die einzelnen Bereiche:
| Video Informationsbereich | Lens Profil | Gyrodaten |
|---|---|---|
 |
 |
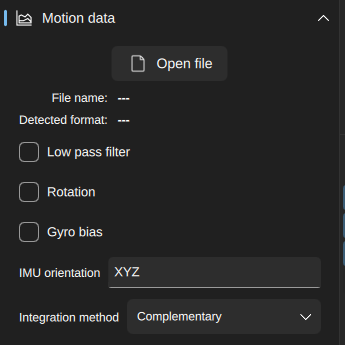 |
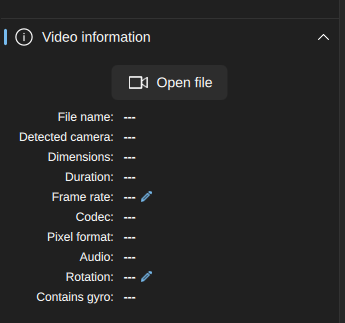
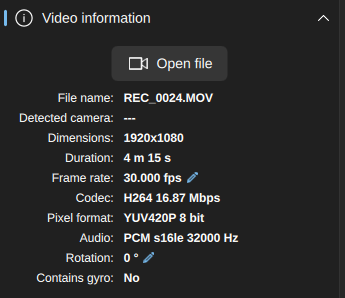
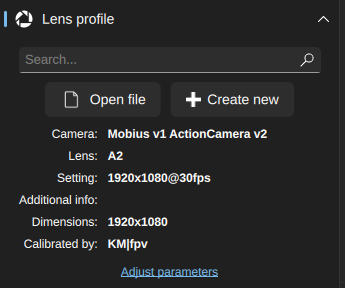
| alle Informationen zum geladenen Video sind hier zu finden: Dateiname, erkannte Kamera, Auflösung, Video- und Audio - Codecs, Bildrate, Dauer, ob Gyrodaten enthalten sind | Profil für das Objektiv der Kamera, um die Verzeichnung zu mindern, bzw ein eigenes Profil zu erstellen | Gyrodaten aus dem geladenen Video oder eines BBL. Ausserdem werden hier der sogn. Low pass filter, der Gyrodaten-Versatz (gyro bias) und evtl. Kamerawinkel angegeben |
Dieser Bereich ändert sich natürlich, sobald ein Video und entsprechende Daten (Lens Profil und Gyrodaten) geladen wurden:
| Video Informationsbereich | Lens Profil | Gyrodaten |
|---|---|---|
 |
 |
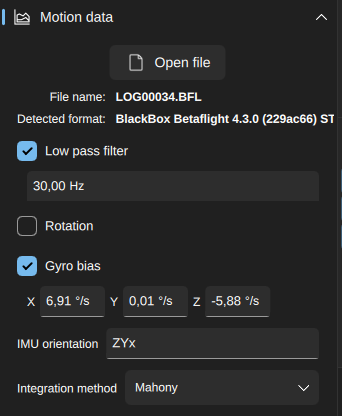 |
| Hier ist nun das Video meiner mobius ActionCam geladen. Die Kamera wurde nicht erkannt, da diese Information nicht in der Datei enthalten ist, alle anderen Informationen sind geladen. | Ich habe hier nun mein eigenes Profil für die Kamera und das Objektiv (Lens A) geladen. Es ist auch möglich, hier die Daten anzupassen, das ist in der Regel aber nicht notwendig. | Das BBL von meinem QAV180 ist hier nun auch geladen und zeigt woher die Daten kommen. Weiter ist ein sogn. Low pass filter von 30Hz gesetzt, dies habe ich selbst gemacht. Ausserdem ist hier bereits der Versatz der Gyrodaten ermittelt. |
Da ich eine mobius ActionCam benutzt habe, startet die Aufnahme "weit" bevor ich den miniKwad selbst starte (arming) und damit ergibt sich ein relativ großer Versatz von Videoaufnahme und Gyrodaten (in diesem Beispiel habe ich zuvor nochmal Einstellungen über das OSD von betaflight vorgenommen).
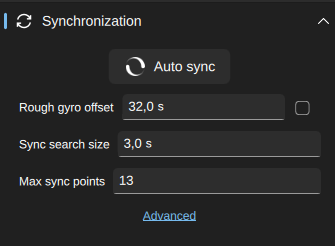
| Synchronisation (einfach) | Synchronisation (erweitert) |
|---|---|
 |
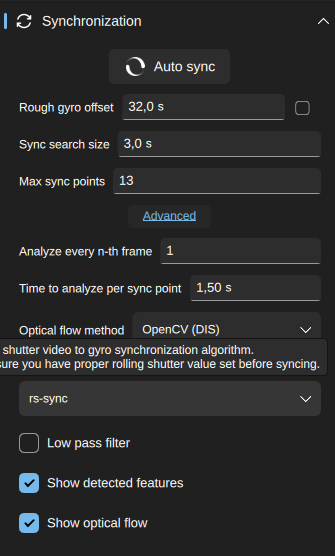 |
| In diesem Bereich zeigt Gyroflow immer die zuletzt benutzten Einstellungen zum Synchronisieren an, das kann bei Kameras mit integrierten Gyrodaten (GoPro, Insta360, Runcam Thumb) unangetastet bleiben, aber nicht in diesem Beispiel. | Hier habe ich die Einstellungen erweitert, um die Werkzeuge für die nicht ganz so einfachen Situationen anzuzeigen (wie in diesem Beispiel) |
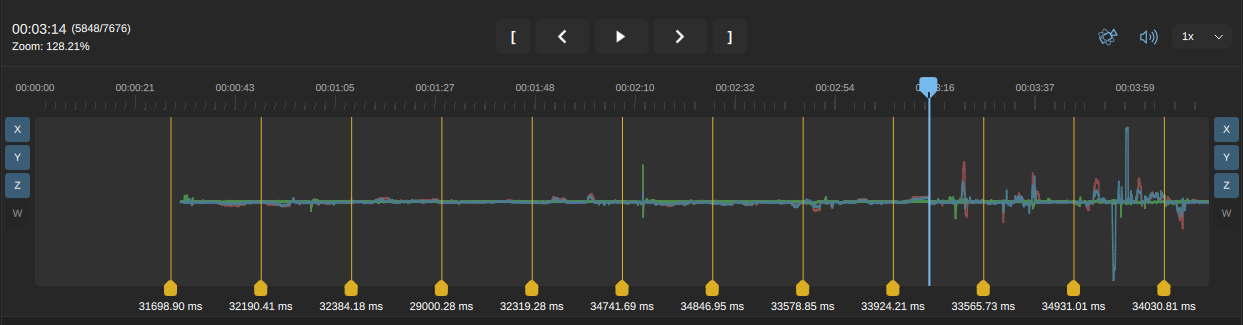
Ich habe mir das Video der mobius vorher angesehen und den Start des miniKwad auf ca 32 Sekunden nach Aufnahmestart festgestellt (rough gyro offset) und max. 13 Synchronisierungspunkte (Standard sind 3) festgelegt. Damit Gyroflow auch die Gyrodaten mit den Bewegungen des Videos Synchronisieren kann, sind 3 Sekunden pro Synchron.-Punkt festgelegt. Die Erkennung der Bewegung im Video erfolgt mit OpenCV (DIS) ein Kompromiss aus "genau und schnell" und re-sync hilft dabei, die Gyrodaten mit dem Video zu synchronisieren, also die Gyrodaten nach hinten zu verschieben, bis der miniKwad sich wirklich bewegt.
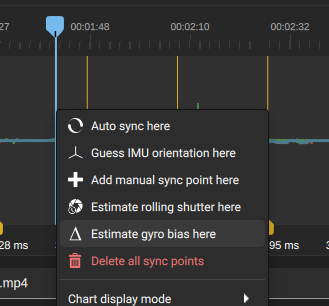
| Gyrodaten anpassen | Bildformat anpassen |
|---|---|
 |
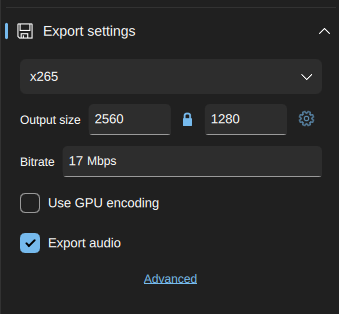 |
| Mit einem Rechtsklick auf die Kurve der Gyrodaten, kann man den sogn. Gyro Bias ermitteln lassen, was nicht immer zu besseren Ergebnissen führt. Bei der Insta360 go (v1) ist dies jedoch auf jeden Fall von Vorteil! | Während oder besser schon vor der Bearbeitung, sollte man sich auf ein Bildformat festlegen. In diesem Format wird die gesamte Bearbeitung in Gyroflow dargestellt. Um nicht normale/konforme Auflösungen einzustellen, muss das kleine Schloß angeklickt werden. |
Schauen wir uns einen Ausschnitt des Videos ohne weitere Anpassungen an:
 Am rechten Rand und am unteren Rand sind schwarze Bereiche zu sehen, die die Verzeichnung des Objektivs darstellen (Tipp 2), bzw. wie Gyroflow das Video anhand der Gyro Daten bewegt und das wollen wir im fertigen Video natürlich nicht mehr sehen, oder zumindest nur minimal, wenn das Video weiterverarbeitet und weiter beschnitten wird.
Am rechten Rand und am unteren Rand sind schwarze Bereiche zu sehen, die die Verzeichnung des Objektivs darstellen (Tipp 2), bzw. wie Gyroflow das Video anhand der Gyro Daten bewegt und das wollen wir im fertigen Video natürlich nicht mehr sehen, oder zumindest nur minimal, wenn das Video weiterverarbeitet und weiter beschnitten wird.
 Hier habe ich nun das FOV (Field OF View - was man später sehen wird) von 1 auf 0,9 verkleinert, das bedeutet sinngemäß, dass in das Video reingezoomt wird. Die schwarzen Ränder sind zwar kleiner geworden, aber noch immer zu groß.
Hier habe ich nun das FOV (Field OF View - was man später sehen wird) von 1 auf 0,9 verkleinert, das bedeutet sinngemäß, dass in das Video reingezoomt wird. Die schwarzen Ränder sind zwar kleiner geworden, aber noch immer zu groß.
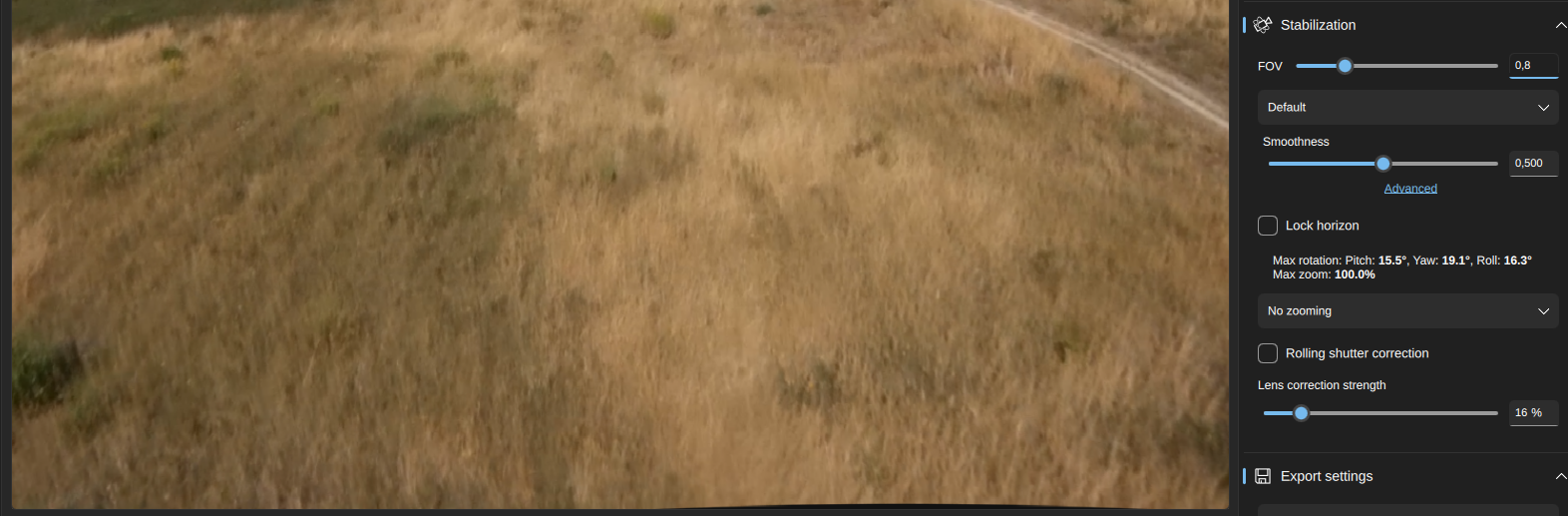 Ein weiterer Versuch, die schwarzen Ränder zu eliminieren ist das FOV von 0,9 auf 0,8 zu verkleinern. Der rechte schwarze Rand war schon beim ersten Versuch weg, der untere Rand ist aber noch immer zu sehen, aber nur noch wenig.
Ein weiterer Versuch, die schwarzen Ränder zu eliminieren ist das FOV von 0,9 auf 0,8 zu verkleinern. Der rechte schwarze Rand war schon beim ersten Versuch weg, der untere Rand ist aber noch immer zu sehen, aber nur noch wenig.
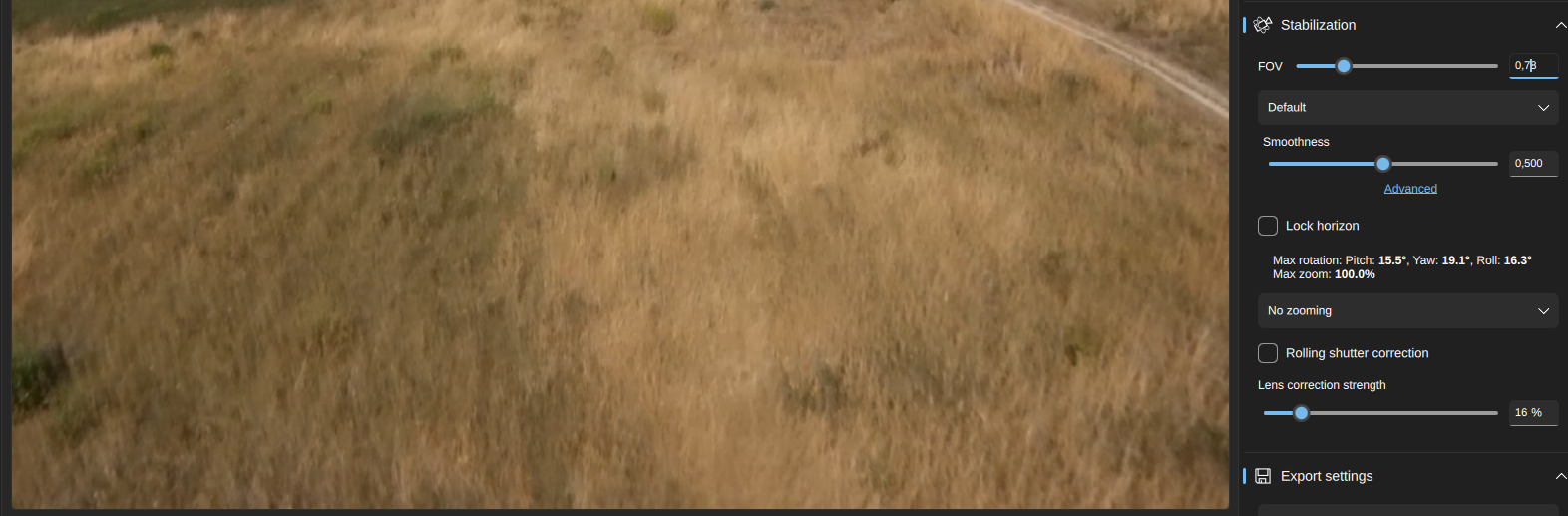 Die Ränder sind nun vollkommen weg, bei einem FOV von 0,78 haben wir ca. 22% des Videobildes verloren. Damit der Verlust von Videomaterial gering bleibt, empfiehlt es sich, in einer höheren Auflösung zu Filmen.
Die Ränder sind nun vollkommen weg, bei einem FOV von 0,78 haben wir ca. 22% des Videobildes verloren. Damit der Verlust von Videomaterial gering bleibt, empfiehlt es sich, in einer höheren Auflösung zu Filmen.
Jetzt wird es recht simpel, je nachdem welcher Flugstil in dem Video zu sehen ist:
| Freestyle | Cinematic |
|---|---|
| Smoothness wird NIEDRIG angesetzt, ich nutze Werte von 0,200 bis 0,400 | Smoothness wird HOCH angesetzt, ich nutze hier Werte ab 0,500 - 0,800 |
Zuletzt schaue ich mir das Ergebnis in Gyroflow an, und passe hier und da nochmal die Smoothness und das FOV an, bevor ich es exportiere. Das geschieht ganz einfach mit einem Klick auf Export nach dem Pfad unter der Timeline mit den Gyrodaten.

Tipps:
1) Lens Correction strength: Ich mag es, wenn das Bild noch Verzeichnung beinhaltet, daher habe ich mich für eine Korrektur von nur 16% entschieden. Ein größerer Korrekturwert führt zum einen zu einem begradigten Horizont und geraden Linien am Bildrand, außerdem geht auch hier wieder etwas Bildmaterial verloren. Das von mir im Beispiel benutzte Video der mobius ActionCam hat allerdings kaum Verzeichnung.
2)
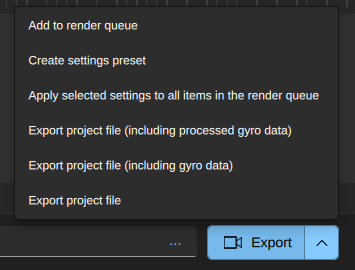
Ich empfehle, die gesamte Arbeit zwischendurch, aber wenigstens zum Ende hin, zu sichern. Dazu muss man das sogn. Dropdown hinter Export drücken und Export project file (including processed gyro data) wählen. Das dauert einen Moment und die Datei ist auch nicht gerade klein, aber man kann seine Arbeit erneut aufnehmen oder korrigieren.