| | "Bottom Plate" und die ersten Standoffs für das PDB |
|
...ich habe mich entschieden, nur den "intelligenten Teil" zu erneuern.
Die Motoren und die ESCs habe ich also gar nicht erst vom Frame genommen, die Montage dieser Komponenten fehlt demnach ganz bewusst.
zum Video... |
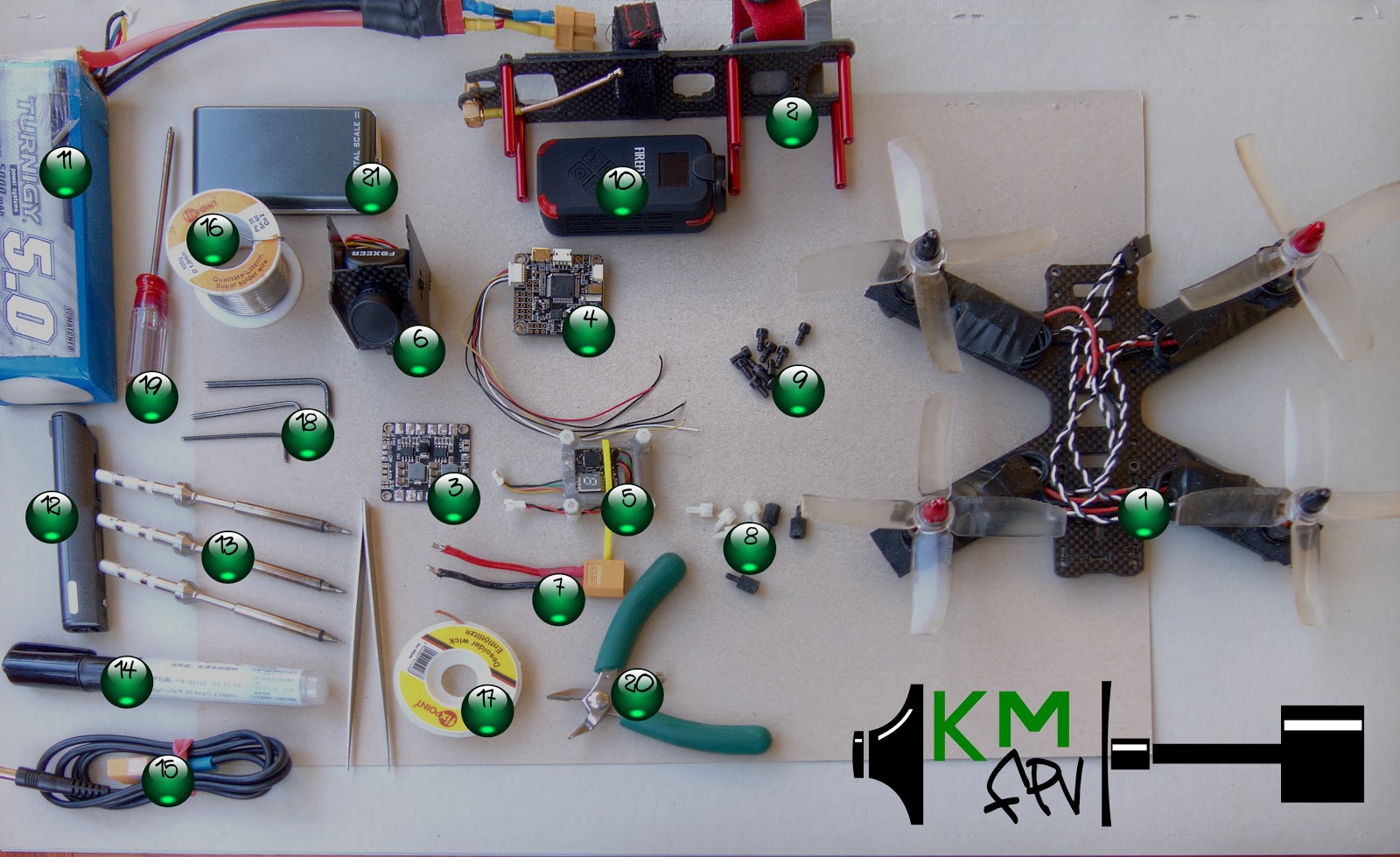
 | | PDB mit den ESCs verbunden |
|
...hier sieht man das (fast) fertig verlötete PowerDistributionBoard (kurz PDB). Verlötet sind hier die vier ESCs und die Stromzufuhr...
zum Video... |
 | | eine vergrößerte Ansicht des flight controllers hilft bei der Planung |
|
...um einen guten Überblick über die Anschlüsse zu haben, empfiehlt es sich einen Plan vom flight controller auszudrucken. Auf diesem Plan kann man dann auch schauen ob man genug Anschlüsse für die geplanten Komponenten hat und wo diese angeschlossen werden können...
zum Video... |
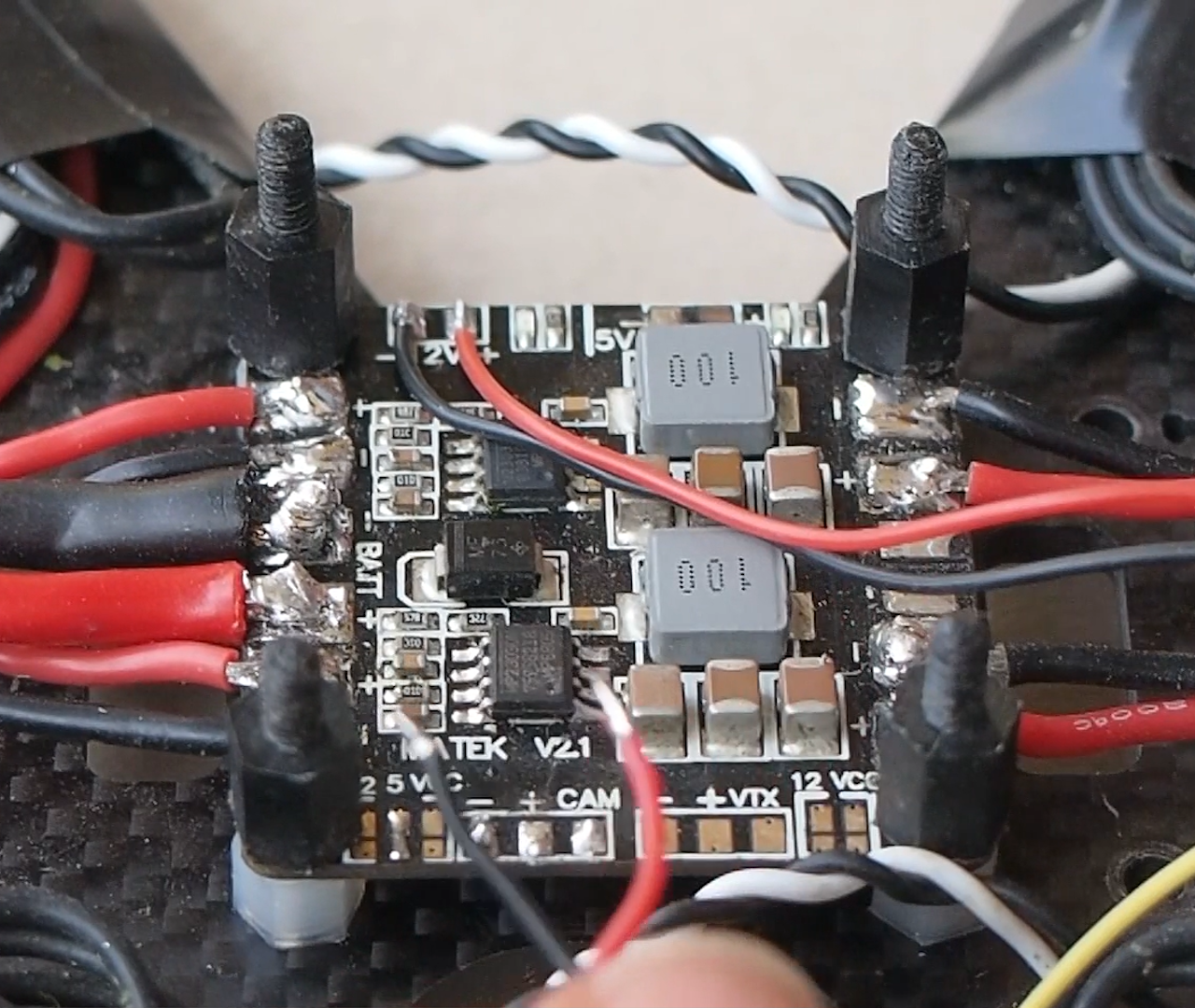
 | | Anschluss von Kamera und VTX |
|
...ein gutes PDB bietet verschiedene Spannungen für verschiedene Komponenten. Das hier verwendete PDB von Matek hat Spannungsregler für 12V und 5V. Ausserdem kann auch VBat (Vcc) an einer Lötbrücke für den VTX gewählt werden...
zum Video... |
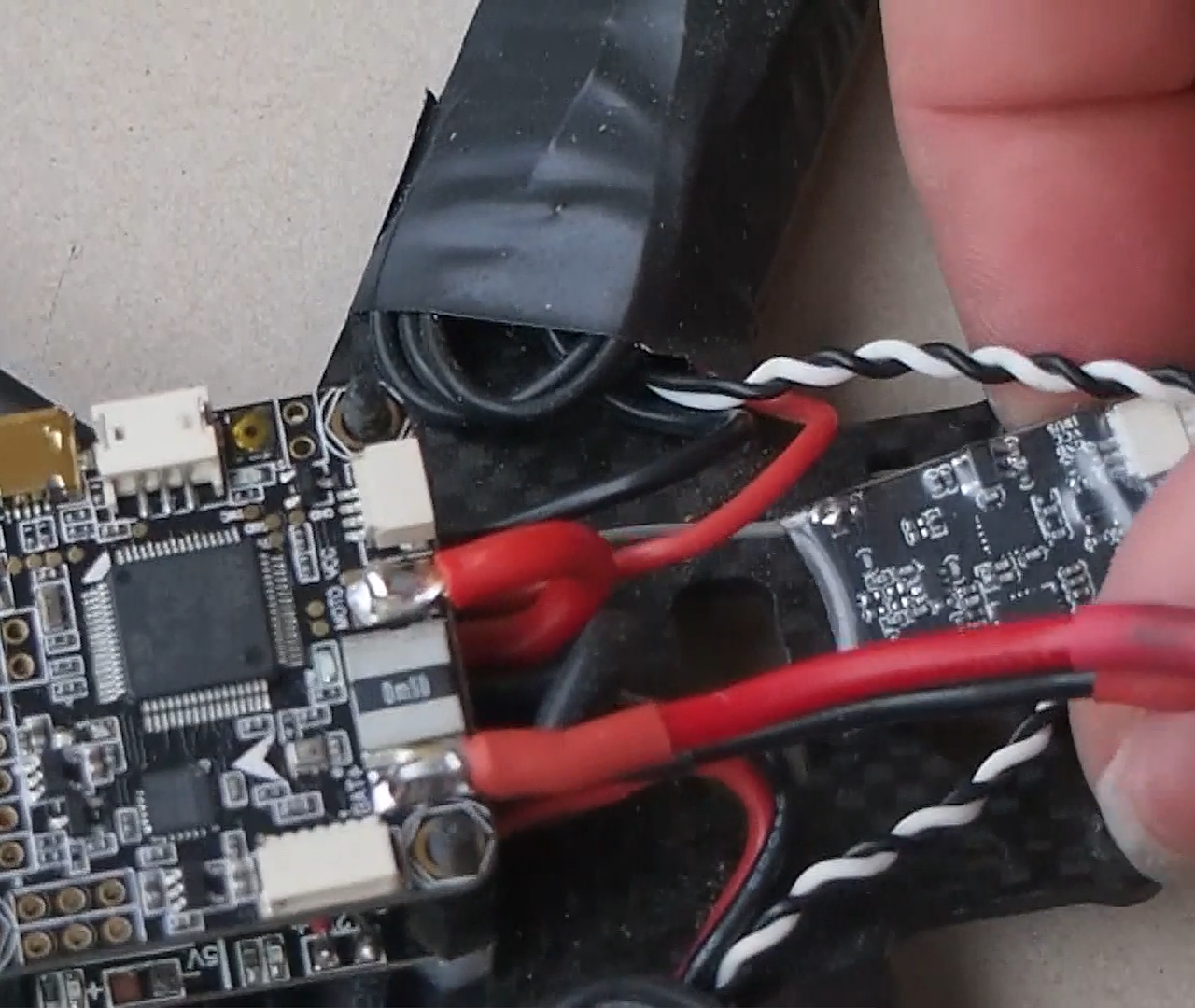
 | | flight controller, PDB und LiPo Anschluss verbunden |
|
...der "intelligente Teil" des miniKwads beinhaltet einen flight controller mit integrierter Spannungs- und Stromüber-wachung, daher geht das positive LiPo Kabel an den flight controller und von dort weiter an das PDB. Im betaflight OSD kann ich mir somit die Spannungen, den Stromverbrauch, sowie die Gesamtleistung anzeigen lassen.
zum Video... |
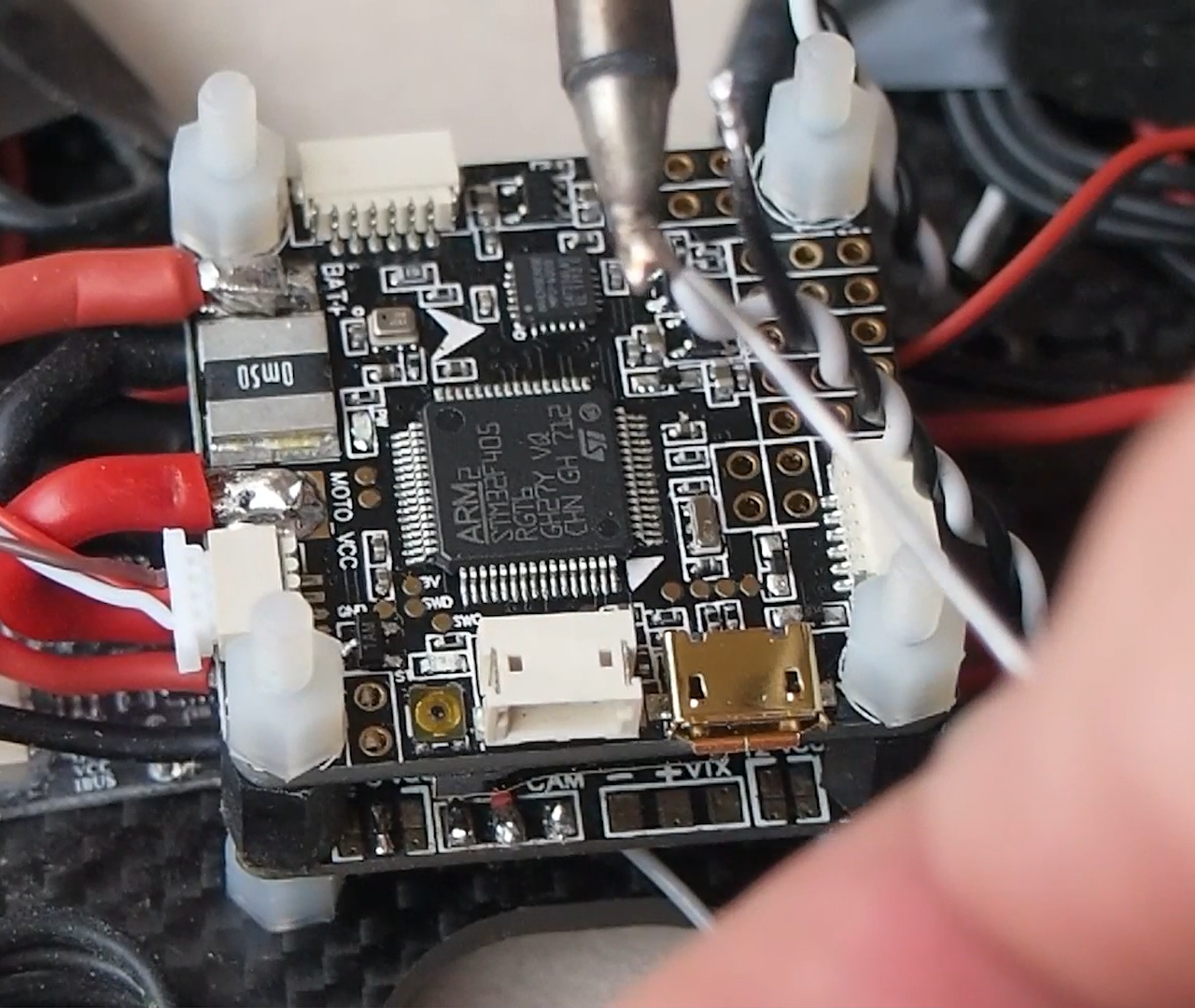
 | | Anschluss der ESCs am flight controller |
|
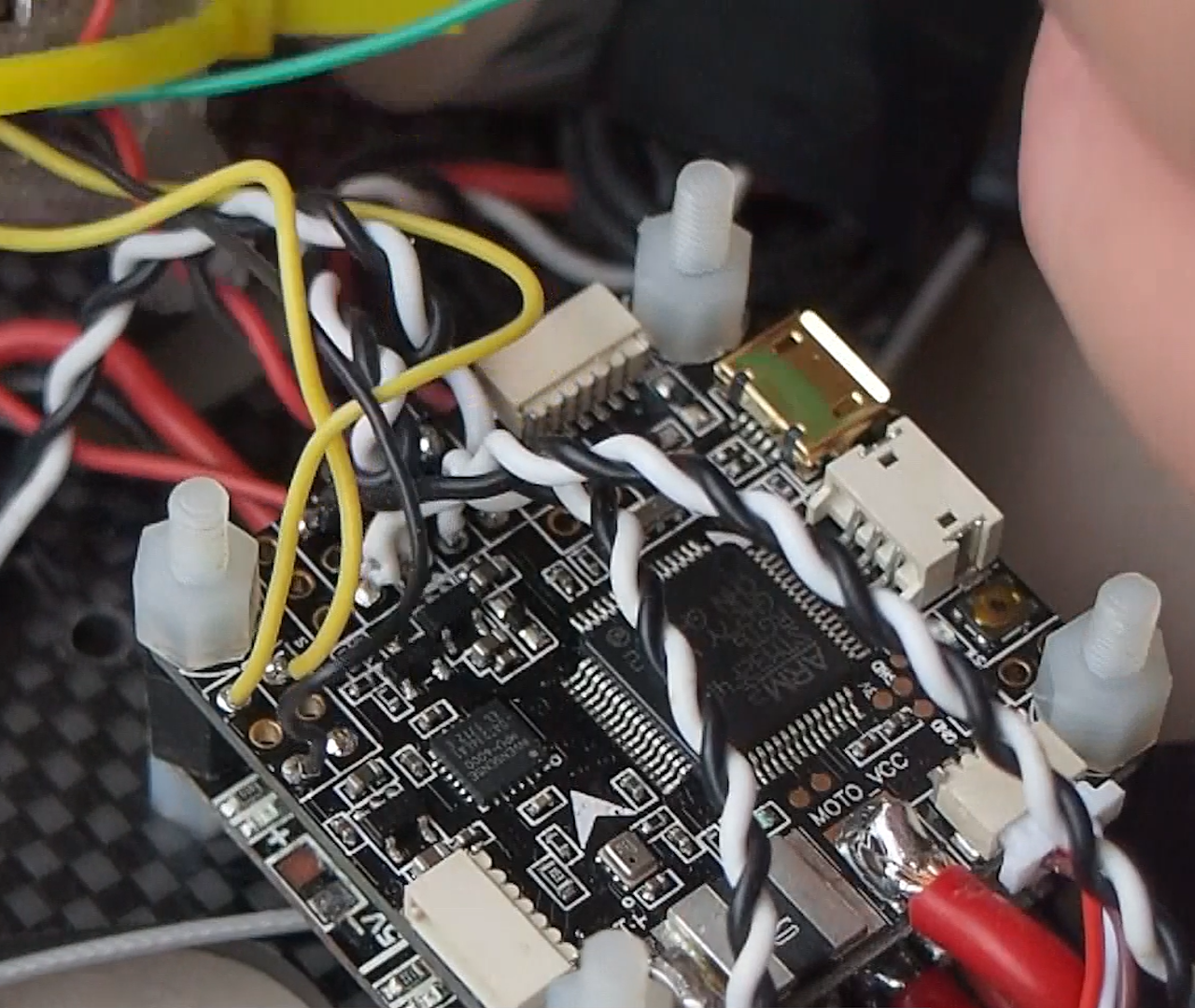
...damit der miniKwad auch fliegt wie man es möchte, werden die ESCs am flight controller mit je einer Signalleitung und einer passenden Masse angeschlossen. Einige Piloten lassen hier auch gerne mal die Masseleitungen weg, dies hat sich jedoch als fataler Fehler herausgestellt! Gut ist aber das Verdrehen der Signal- mit Masseleitungen.
zum Video... |
 | | Kamera und VTX am OSD des flight controller anschließen |
|
...die Omnibus flight controller bieten als einer der ersten ein OnScreenDisplay (kurz OSD), mit dem Informationen über den aktuellen Status des miniKwads in das Video-Bild eingespeist werden können; um dies nutzen zu können, wird das Signal der Kamera in den flight controller gespielt und dann von diesem mit den OSD-Daten an den vtx weitergegeben (in Echtzeit!).
zum Video... |
 | | der VTX als oberster Teil des Stacks |
|
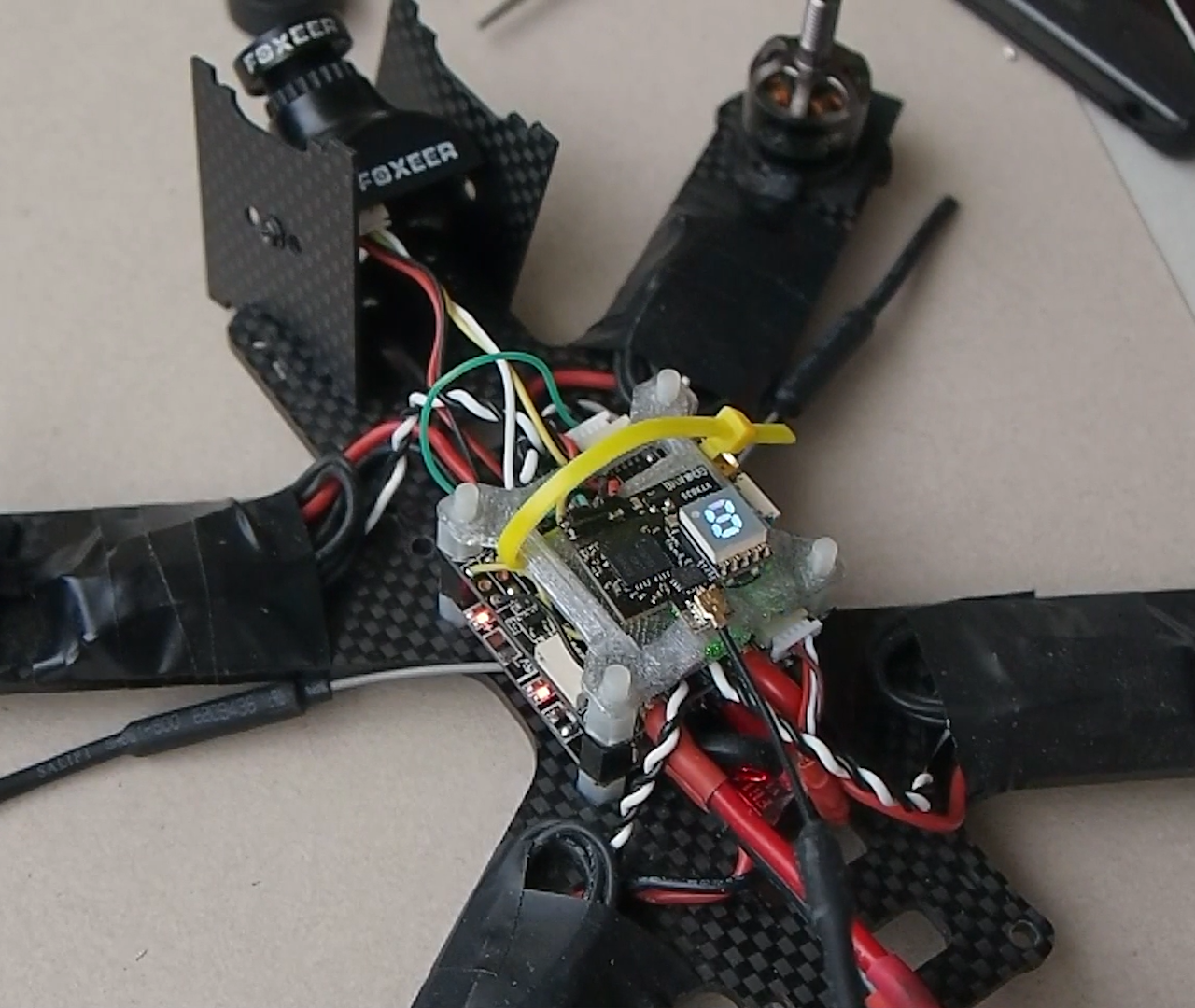
...als letzter "intelligenter Teil" kommt nun der VTX in seiner speziell entworfenen Halterung auf den Stack, damit dieser auch an seiner Position bleibt, wird er mit einem Kabelbinder fixiert.
zum Video... |
 | | ein erster Test des Systems |
|
...nun können wir das ganze System einmal testen. Am besten hat man sich einen sogn. SmokeStopper zugelegt oder sich nach der Anleitung von Joshua Bardwell einen selbst gebaut.
Ich habe keinen und hatte bisher immer Glück!
DAS KANN SICH AUCH MAL ÄNDERN!!!
zum Video... |
|
mit dem eachine rotg01 kann man sich das Videobild auf ein kompatibles Smartphone holen; zum fliegen ist es aber eher nicht geeignet. Die hier verwandte Software gibt's im Google Play store (USB Camera Pro 5,99 EUR)
zum Video... |
 | | Endmontage mit "Top Plate" |
|
...nachdem wir uns vergewissert haben, dass alles funktioniert, können wir nun die "Top Plate" mit Action Camera Halterung auf der "Bottom Plate" befestigen. Natürlich wurde vorher die kurze Antenne gegen einen rp-sma Adapter getauscht, damit später eine gute Antenne aufgeschraubt werden kann.
zum Video... |
 | | fast fertig |
|
...mit einem selbst-umgenähten Klettband wird nun die Action Camera auf ihrer Halterung fixiert, dazu habe ich vorher ein Stück Moosgummi aufgeklebt, da die Hawkeye Firefly Q6 in einem mit Soft Touch Lack Gehäuse daherkommt rutscht sie auch nicht einfach weg.
zum Video... |
 | | jetzt noch die Propeller |
|
...jetzt fehlen nur noch die Propeller und dann können wir auch schon fliegen gehen...
zum Video... |