...war sehr lehrreich!
Ich bin Fotograf, ich bastel und programmiere gerne und freue mich "wenn ein Plan funktioniert".
Auf der Suche nach interessanten Projekten, stieß ich etwa im Sommer 2014 auf ein Projekt namens "MultiWii", das sollte alles ändern!
Ich infizierte auch gleich einen Freund mit der Idee diesem Projekt zu folgen und so geschah es, dass wir Ende August 2014 ein paar arduino nano, arduino pro mini, MPU6050 und andere Sensoren bestellten.
Ich verkaufte mein komplettes Fotostudio Equipment (war sowieso nicht so gelaufen wie geplant) und investierte in einen Alien frame (gefiel mir halt), ein PDB und natürlich in ein paar LiPos.
Die ersten Teile bestellte ich bei AliExpress und bei ebay.
Weiter fand ich bei ebay eine neue Spektrum DX6i für einen günstigen Preis, sowie die ersten Motoren-ESC-Propeller - Sets.
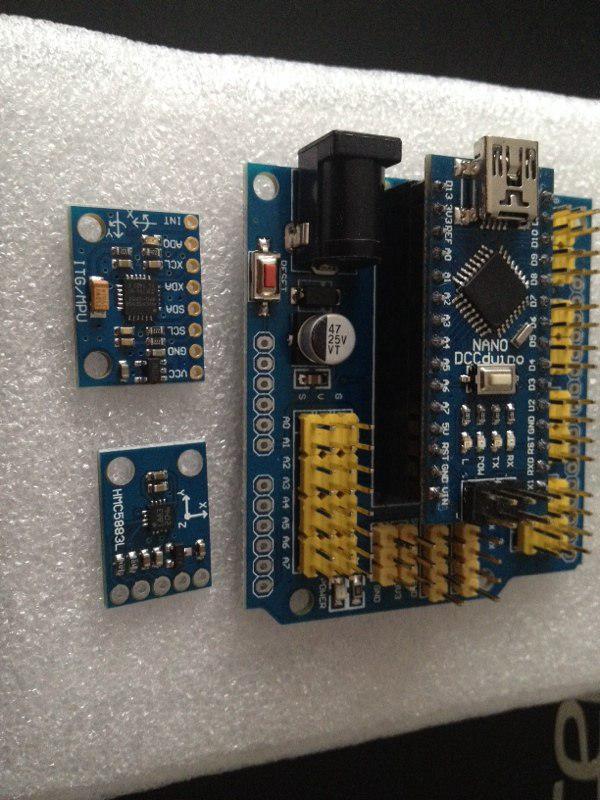
 | | arduino boards (nano und pro micro) |
|  | | Sensoren |
|  | |
DRobot Shield für nano v3 und die Sensoren |
|
Der Plan:
Einen Quadcopter bauen, der erstmal nur meine GoPro Hero 3 white (reicht ja erstmal) durch verlassene Bauwerke trägt. Mein Kumpel und ich sind vorher öfter unterwegs gewesen, um den Zerfall verlassener Orte fotografisch festzuhalten.
Der Alien frame sollte dafür perfekt geeignet sein. Die LiPos passen hinten in den frame und in der Mitte sitzt der arduino und seine Sensoren (GY-87 - 10DOF) und der 6 Kanal Spektrum PWM Empfänger. Von fpv hatten wir ja quasi nichts gehört oder gar gedacht, obwohl die Frage "...und wie sieht man wo man hinfliegt?" definitiv im Raum stand.
 | | Das günstigste Set |
|  | | PDB |
|  | | Alien550 mit Turnigy 3S 5.000mAh |
|
Die Realität:
Irgendwann war dann alles zusammengebaut und der erste Flugversuch konnte starten. Mein Kumpel hatte einen DJI Flamewheel F450 (clone) und sein Quadcopter hob direkt ab. Mein Alien aber spielte lieber "dead bug" und drehte sich ständig auf den Rücken. Das nervte wirklich sehr! Mein Kumpel hingegen schaute sich kurz meine PIDs an und fragte ob er diese mal anpassen dürfte. Ich stimmte zu und wir gingen wieder los. F450 und ein Alien hoben ab! In Gedanken "unstoppable", passierte immer wieder das gleiche: Quadcopter fliegt halbwegs (immer mit Gezwitscher) und landete mehr oder weniger sanft und es brachen dutzende Propeller (10" billigstes Plastik), es brannten ESC ab/durch und natürlich waren auch die brushless Motoren (Supppo X2212 - 1000kV) und diese Ausleger ständig kaputt.
Erste Erkenntnis für mich:
Mein Alien frame ist "echt scheiße"!
Lösung:
Ich orderte mir auch einen DJI Flamewheel F450 clone, mehr Propeller, Ersatz-ESC und Motoren (ein ebay-Händler aus Hamburg machte mit uns viel Geld, obwohl wir mittlerweile per Mail günstiger einkaufen durften).
Sonstige Errungenschaften:
Irgendwo im rcgroups-Forum las ich dann was von "Flip Flight Controller" also wurden neue boards gekauft, diese sogn. Flip flight controller sind ein arduino mit (atmega328p) und MPU6050 drauf. Das war schonmal besser als die selbstgebauten Platinen mit arduino und GY-87 (vorher sogar noch MPU6050 + HMC5883L + BMP085!!!). Diese kleinen 30.5x30.5mm boards waren erstmal toll!
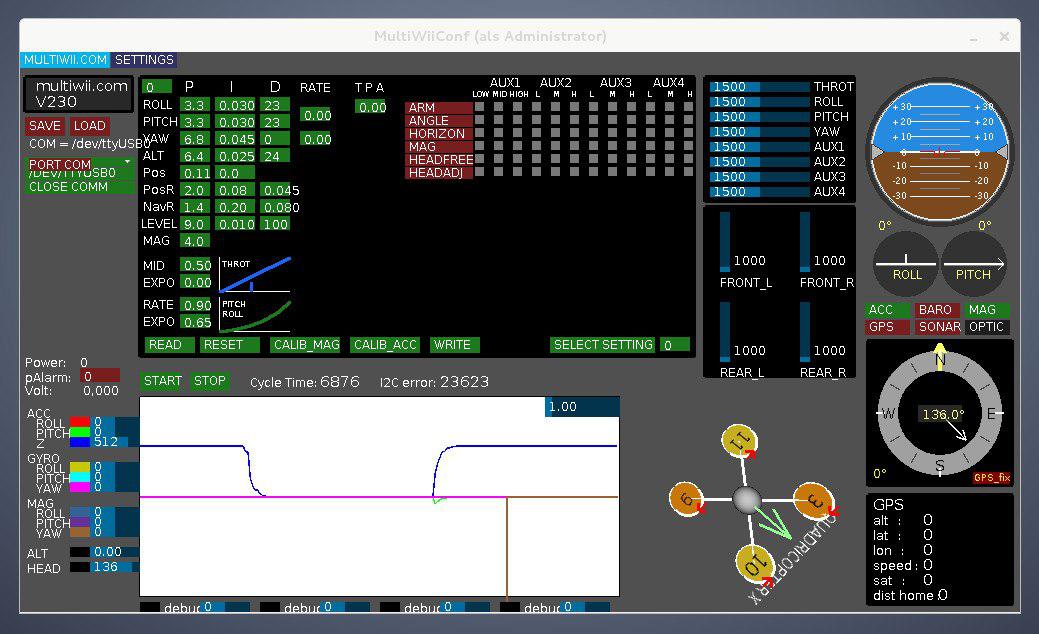
 | | MultiWii gUI |
|  | | Flip (atmega328 + MPU6050) |
|  | | F450 + mobius Gimbal |
|
Eine neue Ära?
Ich lese sehr gerne im Netz, da stieß ich auf OpenPilot und den CC3D flight controller. Dieser hat einen STM32F1 Prozessor! Die 32 steht für deutlich mehr Leistung als Atmels atmega328(p) mit 8 bit. Vielleicht nicht richtig gelesen oder zu hastig überflogen, erklärte ich meinem Kumpel, dass arduinos jetzt out sind und es in Richtung 32bit geht und wir jetzt ein sogn. STM32F1 board (alias "blue pill") anstelle des arduino brauchen (Gedanke: von Hause aus mit 72 MHz + neuer externer Quarz = übertakten!?).
Die STM32F1 boards kommen recht schnell und ich habe auch so viel gelesen, dass ein Bootloader eingespielt werden muss. Also hat mein Kumpel die boards mitgenommen und diesen ominösen Bootloader eingespielt (ST-Link Tool und was man nicht noch alles brauchte hatte er sich von Arbeit geliehen). Doch das war leider falsch! Ich schloss das Board an meinen Rechner mit OpenPilot an und flashte die Firmware der Software (GCS - Ground Control Station) und nichts ging mehr. Irgendwie war das alles falsch, aber ich schaffte es den Bootloader noch einige Male einzuspielen ohne etwas damit erreichen zu können.
Jetzt aber wirklich:
Also habe ich mehr gelesen und diesen rcgroups thread gefunden "Cheap DIY control board: Naze32" gesehen, und dann ging es wirklich los. Ich lud das file mit dem Namen "baseflight.hex" runter, flashte es wie die anderen files zuvor. Diesmal war alles anders: es funktionierte!
Ich hatte alles wie in diesem thread beschrieben verbaut (erstmal nur auf einem Steckbrett) und startete MultiWii-GUI und es funktionierte! Fünf Minuten später kannte ich auch die richtige Oberfläche dazu: Baseflight in Chrome Apps. Baseflight lies sich super einfach konfigurieren und erkannte auch meine drei Sensoren ohne Probleme. Also kamen noch ein GPS-Modul und natürlich auch ein Sonar dazu. Ich habe bei YoutTube einen (Franzosen?) gesehen, der seinen Quadcopter im Treppenhaus nur mit Pitch vorwärts steuerte und der Quadcopter korrigierte selbständig die Höhe. DAS KANN MAN MACHEN??? Ich will alles!!!
Doch das war irgendwie nicht mehr so richtig mein Ziel, ich wollte erstmal fliegen, also wanderte diese ganze Technik wieder in den Alien frame und durfte erstmal auf ein Gimbal warten. In der Zwischenzeit fand ich dann raus, dass AliExpress den CC3D für günstiges Geld verkauft und mal wieder eine Hand voll bestellt. Ab jetzt 32bit in einem 30.5x30.5mm board, aber nur mit MPU6050!
Die Spannung steigt:
Die CC3D kommen an, wie schon mit der ersten Bestellung bei AliExpress kommt der Briefträger nach oben in den ersten Stock und lässt sich den Empfang quittieren.
Mein Rechner hatte bereits OpenPilot installiert und ich schloss gleich das erste CC3D an, richtete es nach Anweisungen auf dem Bildschirm ein. Alles lief reibungslos, so geht's also auch!?
Propeller drauf und den Quadcopter auf's Bett im Schlafzimmer gestellt und scharf gestellt. Die Propeller drehten langsam und ich gab langsam mehr Gas (das muss doch im deutschen besser auszudrücken sein!?). Mein DJI Flamewheel F450 clone hob ab und ich berichtete meinem Kumpel davon. Am gleichen Abend hatte er seinen Quadcopter ebenfalls umgerüstet und der nächste Samstag konnte kommen.
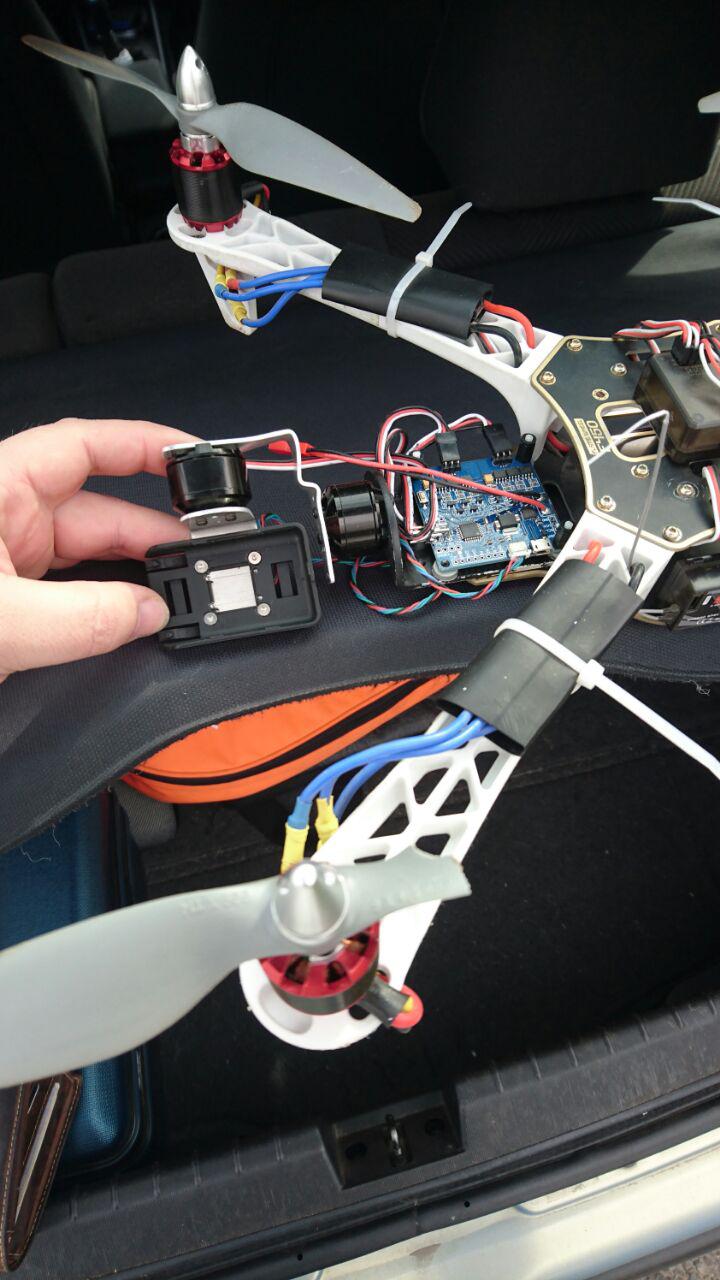
 | | Alien mit GPS & Sonar |
|  | | F450 + Flip FC |
|  | | F450 startklar |
|
Erfolgreich gestartet:
Samstag vormittag, 10 Uhr 20, ein Feld am Ende der Lipschitzallee bzw. Ringslebenstrasse, die Sonne scheint und zwei zuversichtliche Piloten legen ihre LiPos in den frame, schalten ihre Spektrum DX6i ein - "Throttle down, Yaw right" die beiden Fluggeräte sind scharf. Beide tragen eine GoPro. Sie steigen hoch, etwa 30-50m vielleicht auch höher. Sie fliegen vor und zurück, drehen langsam auf der Stelle und landen nach etwa 12-15 Minuten wieder. Ein tolles Gefühl! So geht es viele Wochenenden zum gemeinsamen "Drachensteigen ohne Schnur" auf diesem Feld, in der Gartenstadt "Frauenviertel" (Südpark), Tempelhofer Feld und andere kleinere Stellen in verschiedenen Parks. Auch ein Ausflug ins längst geschlossene und verwahrloste BLUB in Neukölln folgte.
Nächster Schritt:
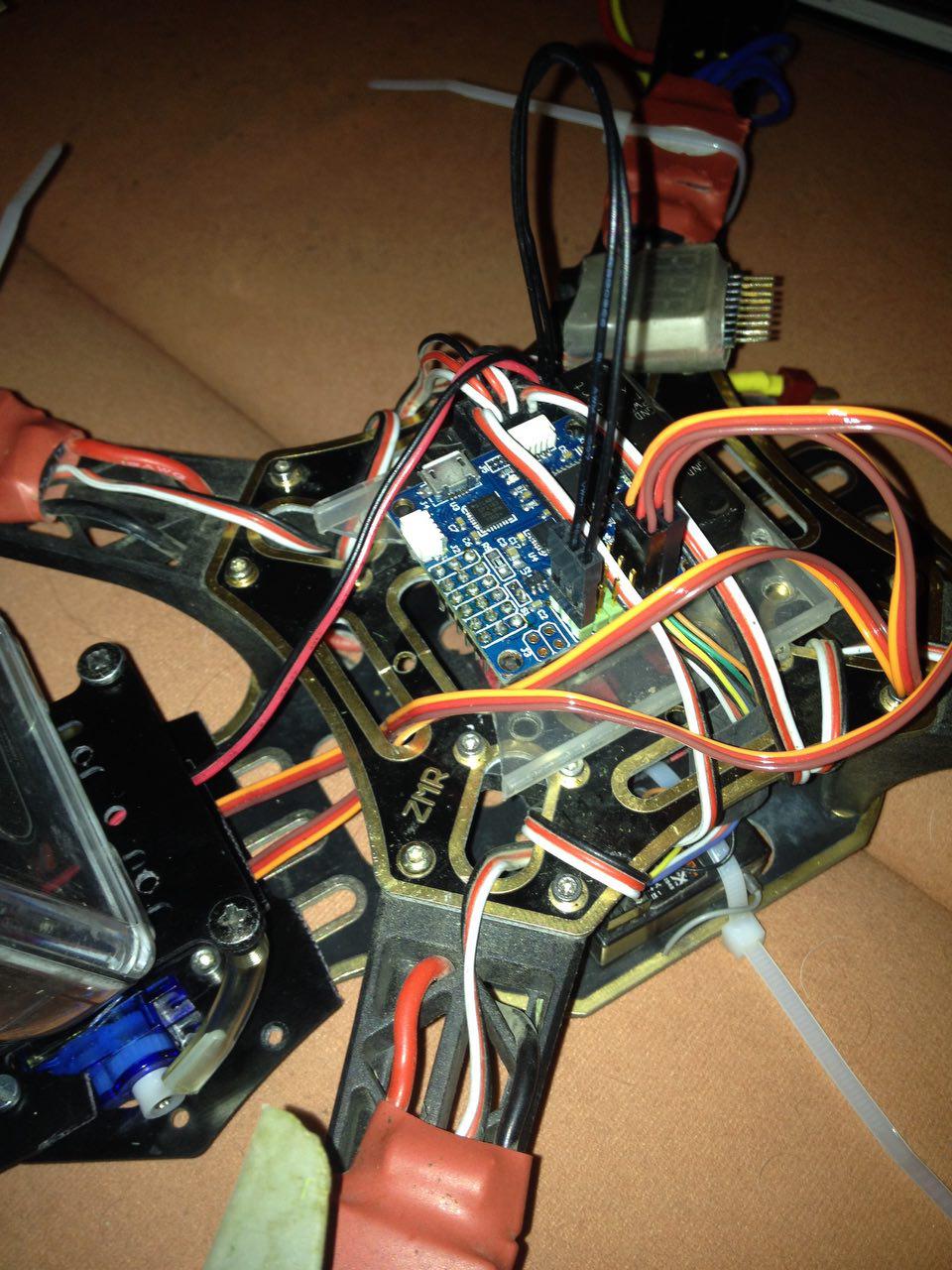
Überall diese Race-Quadcopter a.k.a. "miniKwad", ich probiere das auch mal. Ich bestelle mir bei AliExpress einen ZMR250 im rundum-sorglos-Paket. Ein neues board gibt's auch noch: Naze32 rev.6 ein STM32F1 board mit MPU6050, Speicher-Chip für "flight logs", VBAT - Überwachung, Buzzer, uvm. Mit dem naze32 zieht auch cleanflight als Firmware ein. Ich baue also meinen ersten "miniKwad" und bin beeindruckt. Ich starte meinen ersten Flugversuch dieses kleinen Beasts bei recht heftigem Wind auf dem bereits o.g. Feld. Der kleine interessiert sich kaum für den Wind und ist sehr agil und vor allem stabil.
Mein Flamewheel clone erhält ganz nebenbei neue Propeller von APC, doch die Suppo kommen nicht mit deren Gewicht klar. Ich bestellte neue Motoren, mit deutlich mehr Leistung und habe super Flugeigenschaften kennengelernt. Mein Gimbal besteht erst aus zwei mini-Servos und stabilisiert meine GoPro hervorragend. Später kam eine neue Cam die die GoPro ablöste: MOBIUS und für diese gibt es nun ein Gimbal mit brushless Motoren. Die Luftaufnahmen sind deutlich schöner, aber auch nicht spektakulärer als zuvor.
Ein zweiter Flamewheel clone zieht bei mir ein, diesmal mit 8" APC Propellern und SunnySky X2212 1250kv - und einem CC3D, aber noch mit PPM Empfänger (ging ja auch). Wenn der scharf ist, braucht es nur 3 Sekunden bis man ihn nur noch als Punkt am Himmel wahrnimmt. Er trägt den Namen "Berzerker", war mein Spitzname von meinem Kumpel.
Neue Akkus und vor allem neue Empfänger (Spektrum Satelliten) bestimmen nun den Einkaufszettel. Es folgt ein trifecta (Tricopter), der nach wie vor seinen eigenen Willen zu haben scheint und daher nur 3x an der frischen Luft war. Ein LDARC (kingkong) Q100 ist dann mein erster echter fpv "miniKwad". Er hat ein "SP Racing F3 Evo" board mit 8520 brushed/coreless Motoren, eine Q25-mini fpv-cam mit vtx und als Firmware läuft nun betaflight. Eine Brille folgte 2018 auch endlich, ebenso ein eachine pro58 Modul und ich kaufte die Achillez Firmware. Alles läuft...bis auf...
Fazit:
Wir haben ganz unten angefangen, mit den basics. Wir haben Arduino IDE kennengelernt und nutzen das heute noch sehr gerne für verschiedene Projekte (nur nichts mit miniKwad), haben die Arduino boards kennen und lieben gelernt, können Fehler besser eingrenzen und kennen einfach alles was es braucht um "sicher" zu fliegen. Wir haben den Umstieg von 8bit zu 32bit gemacht, den andere gar nicht erst kennengelernt haben.
PS: Produktlinks sind amazon partner/affiliate links!